コンテナターミナルにおける外来トレーラーの自働化に関する現場実証結果
~コンテナ輸送力の維持とドライバーの労働環境改善~
令和5年5月26日
| 「ヒトを支援するAI ターミナル」の取組の一環として、コンテナターミナルにおける外来トレーラーの自働走行に関する取組を令和2年度から実施し、この度、現場実証の結果をとりまとめました。引き続き、ターミナルの生産性向上、労働環境改善に向けた取組を進めてまいります。 |
1.取組の背景
コンテナターミナルのゲート前における外来トレーラーの待機時間が長時間化し、ドライバー不足やコンテナ輸送力の減少が問題となっている中、ドライバーの労働環境の改善や荷役効率の向上を図り、コンテナ輸送力を維持する必要があります。
2.取組の概要
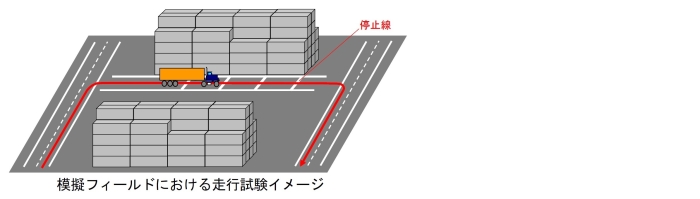
公募により実施場所を選定し、実際のターミナルにおける現地調査及び模擬フィールドにおける自働走行試験を行い、自働走行に係る安全性の検証を実施しました。具体には、走行レーンからのはみ出し、GNSS や各種センサーによる車両位置の検出精度、決められた荷役位置(停止位置)での停止精度、荷役機械との連携について現場実証を行いました。
<実施場所>
横浜港本牧ふ頭地区HDG オフドックバンプール
<実証項目>
1.自働トレーラーの走行軌跡
・設定したルートからの逸脱
・蔵置コンテナによるGNSS の精度への影響
・直進部、カーブ部の走行(走行幅、回転半径など)
2.荷役を想定した位置および一時停止箇所における自動停止・発車
3.現場実証結果
ターミナルを再現した模擬フィールドにおいて、自働走行の基本動作や安全性に大きな問題が無いことが確認出来ました。
一方で、社会実装のためには、車両の走行速度や停止精度向上といった更なる技術開発が必要であるほか、実際のターミナルをモデルとした運用方法や運用ルール等について、関係者において詳細に検討する必要があります。(詳細は別紙参照)
引き続き、関係者のご理解とご協力のもと、ターミナルの生産性向上、労働環境改善に向けた取組を進めてまいります。

お問い合わせ先
- 国土交通省港湾局 港湾経済課 港湾物流戦略室 安部、吉田
- TEL:03-5253-8111 (内線46854、46644) 直通 03-5253-8628
![]()
![]()
PDF形式のファイルをご覧いただくためには、Adobe Acrobat Readerが必要です。
左のアイコンをクリックしてAdobe Acrobat Readerをダウンロードしてください(無償)。
Acrobat Readerをダウンロードしても、PDFファイルが正常に表示されない場合はこちらをご覧ください。
![]()